# Интегрированная система помощи при парковке
# Описание системы интегрированной системы помощи при парковки
Интегрированная система помощи при парковке состоит из 1 панорамного контроллера слияния, 4 камер кругового обзора, 8 радиолокационных датчиков и 8 держателей радиолокационных датчиков. Системы содержит радар защиты от столкновений, функции панорамного кругового обзора.
Функция радара системы предотвращения столкновений обнаруживает препятствия впереди и сзади транспортного средств с помощью радиолокационного датчика, вычисляет информацию о расстоянии и местоположении препятствий, звуковую сигнализацию HUT (IP), при этом дисплей с центральным управлением отображает информацию о препятствиях.
Функция панорамного обзора захватывает четырехокружные достопримечательности транспортного средств с помощью 4 камер и с высоты птичьего полета соединяется с контроллером и передается на дисплей среднего управления для отображения.
Меры предосторожности
- При очистке датчика радара протрите его мягкой тканью или промойте водой (вода низкого давления), очистите поверхность радара
- Недоступная водяная пушка высокого давления проводит промывку радарных датчиков
- Не подайте экструзию или удар на поверхность радиолокационного датчика
- Если датчик радара падает или подвергается серьезному удару, препятствия могут не быть обнаружены
- Положение и угол камеры могут измениться после частичного повреждения камеры или столкновения, что может привести к отказу системы изображения
- Не стирайте камеру, она может царапать ее, влияя на эффект изображения
- Не допускайте попадания органических растворов, воска, адгезивов или стеклянных слоев на камеру. Если такие вещества попадают на камеру, немедленно удалите их и промойте чистой водой
- Если температура окружающей среды, в которой находится камера, резко меняется, это может повлиять на ее нормальную работу
- Если камера загрязнена снегом, грязью и т.д., она не сможет показать четкие изображения, промойте камеру чистой водой и протрите чистой мягкой тканью
При следующих условиях может возникнуть неисправность обнаружения или ошибка срабатывания сигнализации
- Радарные датчики покрываются посторонними предметами, такими как грязь или снег (после очистки датчика функция обнаружения нормализуется)
- Замораживание датчика радара (функция обнаружения нормализуется после повышения температуры датчика)
- Радарный датчик заглушен
- Проезд по ухабистым, грунтовым дорогам или по верхним травам
- Ультразвук, создаваемый звуком гудка, звуком двигателя мотоцикла, звуком пневматического тормоза большого транспортного средства или гидролокатором другого транспортного средства в непосредственной близости от транспортного средства
- Проливной дождь или загрязненный водой датчик (распыляется в воду)
- Чрезмерный наклон транспортного средства
- Транспортное средство оснащено антенной панели крыла или механической антенной
- Угол, при котором транспортное средство движется к высокому бордюру или остроконечному объекту
- Совет: При переохлаждении датчик радара может не обнаружить препятствие, если на дисплее есть неисправность
- При обнаружении неисправности сначала визуально осмотрите датчик РЛС, а если датчик РЛС не содержит посторонних предметов или повреждений, возможно, что датчик РЛС неисправен
Изображение трудно различить, даже если оно находится в нормальном состоянии при следующих условиях:
- В кабине используется электрооборудование, создающее помехи
- Если устройство, генерирующее радиоволны, установлено, изображение может вызвать помехи
- Освещение вокруг камеры слишком яркое, например, сильный луч света (солнечный свет или луч фар), падающий прямо на камеру
- Слишком темное окружение камеры (как ночью и т.д.)
- Чрезмерный наклон транспортного средства
Датчик не может обнаружить следующие объекты
- Удлиненные объекты, такие как провода и канаты
- Поглощающие ультразвуковые материалы, такие как хлопок, снег и т.д.
- Предметы с острыми краями
- Короткие объекты
- Высокие свисающие объекты
- Объекты, расположенные непосредственно под бампером (датчики могут обнаруживать невысокие предметы и удлиненные стержни, но, возможно, впоследствии не смогут их отслеживать)
- Препятствия на слишком близком расстоянии
- Радарный датчик не может точно обнаружить расстояние до препятствия, когда автомобиль слишком быстр
# Схема расположения интегрированной системы помощи при парковки
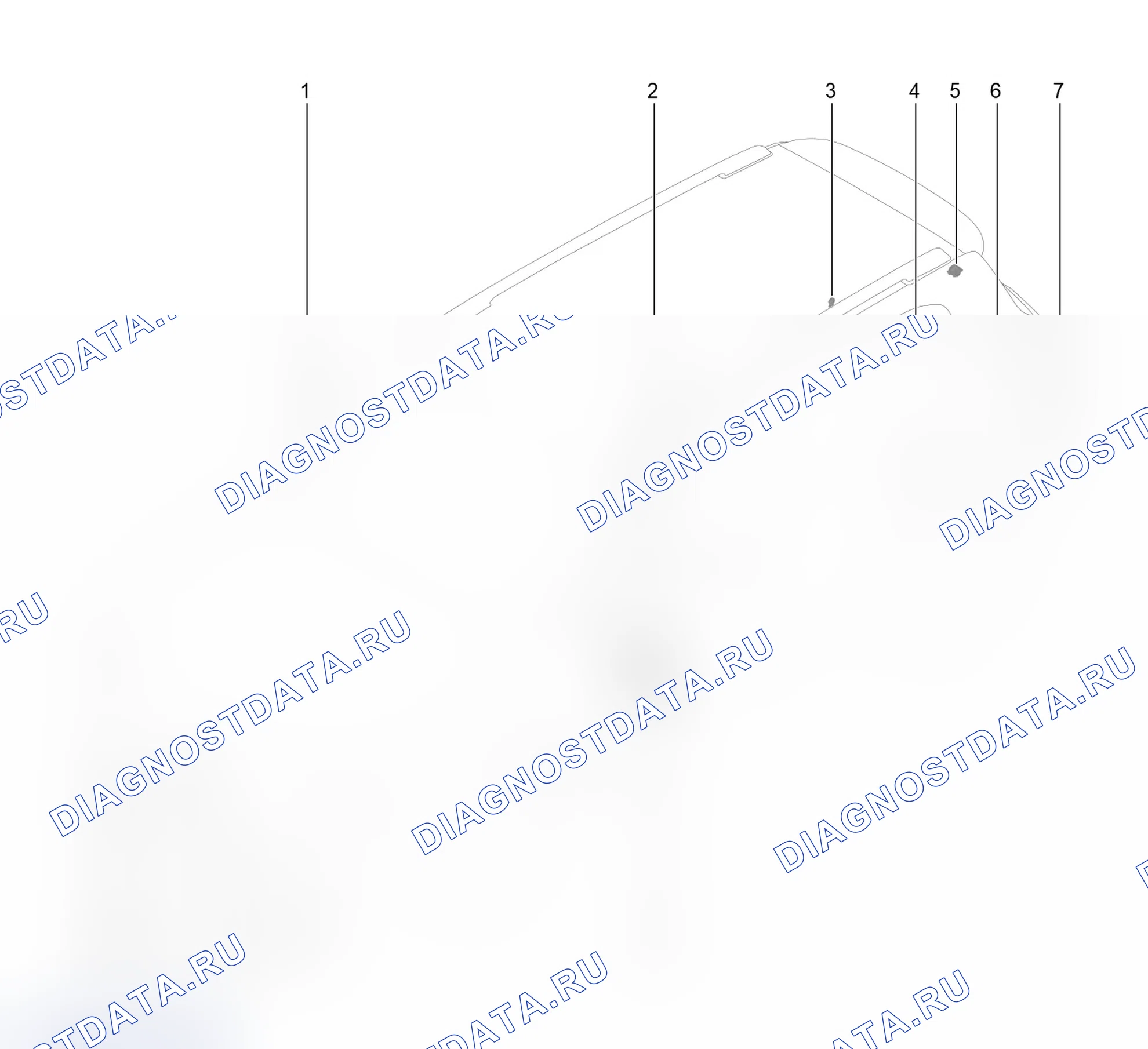
- Правая камера кругового обзора
- Левая камера кругового обзора
- Правый задний радиолокационный датчик для предотвращения столкновений
- Правый задний центральный радиолокационный датчик для предотвращения столкновений
- Задняя камера кругового обзора
- Левая задняя центральная противоударная РЛС-датчик
- Левый задний датчик радиолокационной защиты от столкновений
- Контроллер панорамной системы (AVM)
- Левый передний радар-датчик для предотвращения столкновений
- Левая передняя центральная радиолокационная антенна
- Передняя камера кругового обзора
- Правый передний центральный радарный датчик для предотвращения столкновений
- Правый передний радар-датчик для предотвращения столкновений
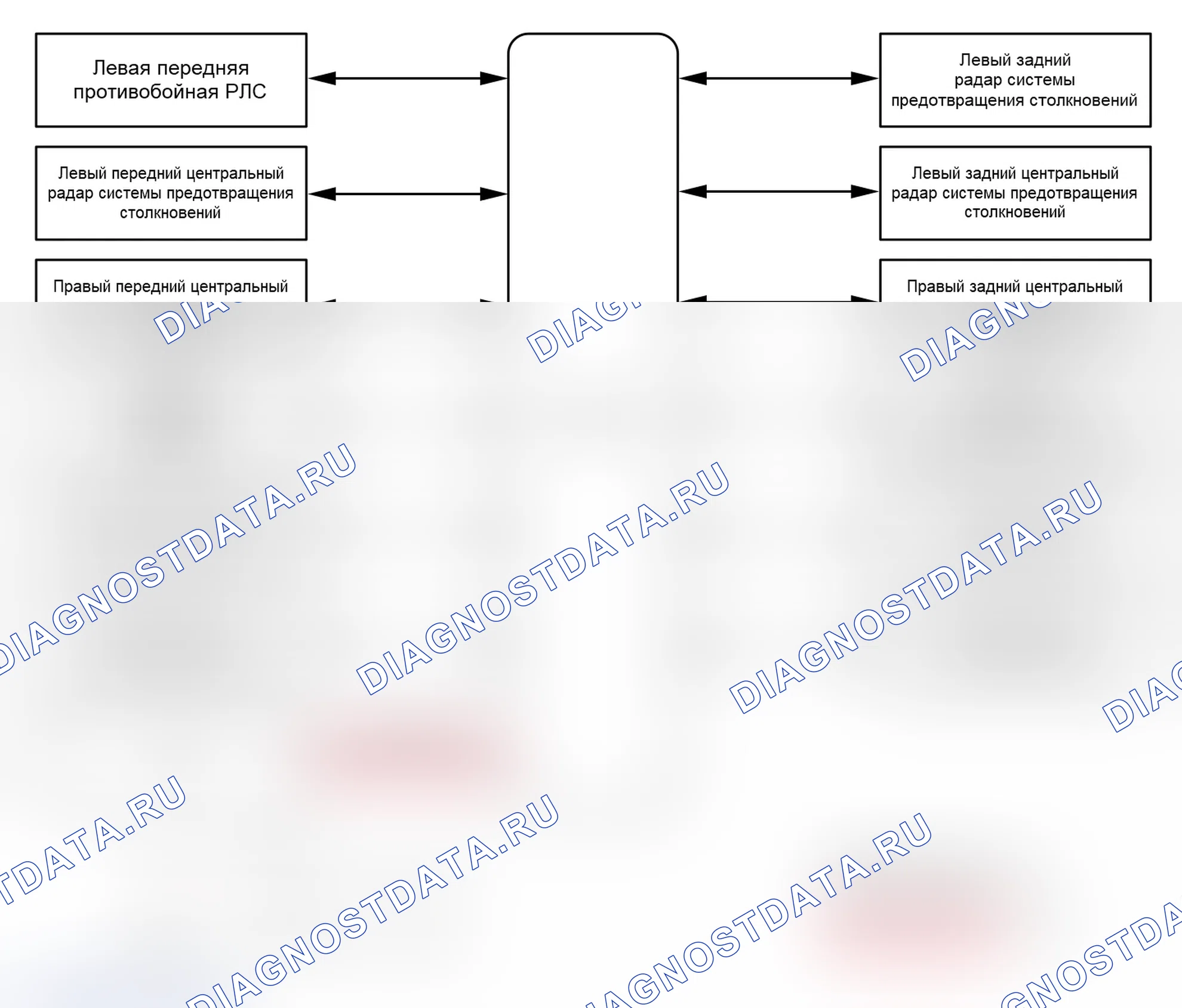
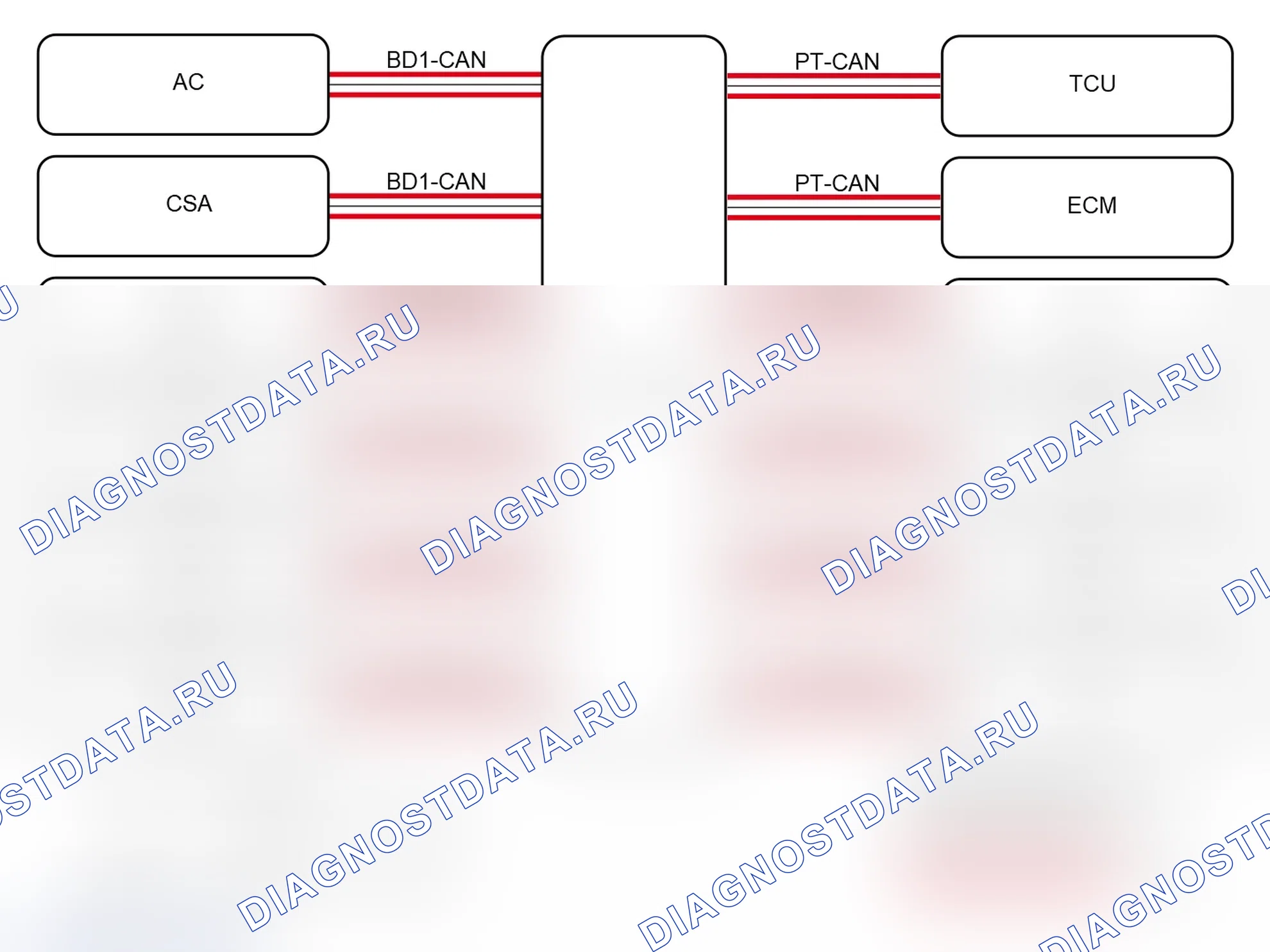
# Схема системы интегрированной системы помощи при парковки
# Регламентированный момент затяжки
| Имя | Крепежные детали | Момент затяжки (Н·м) | Количество | Примечания |
|---|---|---|---|---|
| гайка | Панорамный контроллер слияния × передние полы | 6±2 | 3 | — |
# Таблица кодов неисправностей
| Порядковый номер | Код неисправности (DTC) | Потеря связи с AC |
|---|---|---|
| 1 | U110017 | Слишком высокое напряжение |
| 2 | U110116 | Слишком низкое напряжение |
| 3 | U007388 | Закрытие шины CAN |
| 4 | U010087 | Потеря связи с ECM |
| 5 | U012287 | Потеря связи с ESP (ABS) |
| 6 | U010187 | Потеря связи с TCU |
| 7 | U100087 | Потеря связи с ABM |
| 8 | U100287 | Потеря связи с KBCM |
| 9 | U024587 | Потеря связи с HUT |
| 10 | U016487 | Потеря связи с AC (FCP) |
| 11 | U019987 | Потеря связи с DDCM |
| 12 | U020087 | Потеря связи с PDCM |
| 13 | U110687 | Потеря связи с CSA |
| 14 | U110887 | Потеря связи с F-PBOX |
| 15 | U110987 | Потеря связи с R-PBOX |
| 16 | U014687 | Потеря связи с GW |
| 17 | U010083 | ECM1 ошибок контрольной суммы |
| 18 | U010082 | Ошибка ECM1 кода прокрутки |
| 19 | U0100F4 | Недопустимая частота вращения ECM1 двигателя |
| 20 | U0100F1 | ECM2 ошибок контрольной суммы |
| 21 | U0100F0 | Ошибка ECM2 кода прокрутки |
| 22 | U0100F5 | ECM2 недопустимое положение педали разгона |
| 23 | U0100F3 | ECM9 ошибок контрольной суммы |
| 24 | U0100F2 | Ошибка ECM9 кода прокрутки |
| 25 | U012183 | ABS1 ошибок контрольной суммы |
| 26 | U012182 | Ошибка ABS1 кода прокрутки |
| 27 | U0121F4 | ABS1 недопустимая скорость переднего левого колеса |
| 28 | U0121F5 | ABS1 правая передняя скорость колеса недопустима |
| 29 | U0121F6 | ABS1 недопустимый импульс переднего левого колеса |
| 30 | U0121F7 | ABS1 недопустимый правый импульс переднего колеса |
| 31 | U0121FC | ABS1 недопустимое направление переднего левого колеса |
| 32 | U0121FD | ABS1 недопустимое направление переднего правого колеса |
| 33 | U0121F1 | ABS2 ошибок контрольной суммы |
| 34 | U0121F0 | Ошибка ABS2 кода прокрутки |
| 35 | U0121F8 | ABS2 недопустимая задняя скорость левого колеса |
| 36 | U0121F9 | ABS2 правая задняя скорость колеса недопустима |
| 37 | U0121FA | ABS2 недопустимый импульс скорости заднего левого колеса |
| 38 | U0121FB | ABS2 недопустимый импульс задних правых колес |
| 39 | U0121FE | ABS2 недопустимое направление заднего левого колеса |
| 40 | U0121FF | ABS2 недопустимое направление заднего колеса справа |
| 41 | U0121F3 | ABS3 ошибок контрольной суммы |
| 42 | U0121F2 | Ошибка ABS3 кода прокрутки |
| 43 | U012181 | Недопустимая скорость ABS3 |
| 44 | U0122F1 | ESP2 ошибок контрольной суммы |
| 45 | U0122F0 | Ошибка ESP2 кода прокрутки |
| 46 | U0122F3 | ESP7 ошибок контрольной суммы |
| 47 | U0122F2 | Ошибка ESP7 кода прокрутки |
| 48 | U010183 | TCU5 ошибок контрольной суммы |
| 49 | U010182 | Ошибка TCU5 кода прокрутки |
| 50 | U0101F6 | Недопустимый блокирующий бит TCU |
| 51 | U100083 | ABM1 ошибок контрольной суммы |
| 52 | U100082 | Ошибка ABM1 кода прокрутки |
| 53 | U1000F1 | ABM2 ошибок контрольной суммы |
| 54 | U1000F0 | Ошибка ABM2 кода прокрутки |
| 55 | U1000F4 | Недопустимая скорость ABM2 рыскания |
| 56 | U1000F5 | ABM2 недопустимое боковое ускорение |
| 57 | U1000F6 | ABM2 недопустимое продольное ускорение |
| 58 | U0140F4 | Неправильный сигнал педали тормоза |
| 59 | U014083 | BCM8 ошибок контрольной суммы |
| 60 | U014082 | Ошибка BCM8 кода прокрутки |
| 61 | U100281 | Недопустимый режим питания PEPS2 системы |
| 62 | U018783 | HUT32 ошибок контрольной суммы |
| 63 | U018782 | Ошибка HUT32 кода прокрутки |
| 64 | U012883 | EPB1 ошибок контрольной суммы |
| 65 | U012882 | Ошибка EPB1 кода прокрутки |
| 66 | U0128F4 | Недопустимое положение EPB1 переключателя |
| 67 | U0128F5 | Отказ EPB |
| 68 | U110683 | CSA2 ошибок контрольной суммы |
| 69 | U110682 | Ошибка CSA2 кода прокрутки |
| 70 | U110681 | Отказ SAS |
| 71 | B110111 | Короткое замыкание между напряжением и землей на передней камере |
| 72 | B110114 | Напряжение на передней камере Короткое замыкание питания или разомкнутая цепь |
| 73 | B110211 | Короткое замыкание между напряжением и землей на задней камере |
| 74 | B110214 | Напряжение на задней камере Короткое замыкание питания или разомкнутая цепь |
| 75 | B110311 | Замыкание на землю от напряжения левой камеры |
| 76 | B110314 | Напряжение в левой камере Короткое замыкание питания или разомкнутая цепь |
| 77 | B110411 | Короткое замыкание между напряжением и землей в правой камере |
| 78 | B110414 | Напряжение в правой камере Короткое замыкание питания или разомкнутая цепь |
| 79 | B110517 | Питание внутренней системы IC5V избыточное напряжение питания |
| 80 | B110516 | Питание внутренней системы IC5V напряжение питания слишком низкое |
| 81 | B110617 | Питание внутренней системы IC3.3V избыточное напряжение питания |
| 82 | B110616 | Питание внутренней системы IC3.3V напряжение питания слишком низкое |
| 83 | B110717 | Питание внутренней системы IC1.35V избыточное напряжение питания |
| 84 | B110716 | Питание внутренней системы IC1.35V напряжение питания слишком низкое |
| 85 | B150151 | Система изображения кругового обзора не определена |
| 86 | B150149 | Отказ видеовыхода изображения кругового обзора |
| 87 | B150204 | Отказ последовательного устройства для просмотра изображений |
| 88 | B150202 | Отказ подключения изображения кругового обзора к HUT |
| 89 | B190121 | Слишком короткое время афтершока левого переднего датчика |
| 90 | B190100 | Неправильное состояние сигнала левого переднего датчика |
| 91 | B190114 | Левая передняя сенсорная станция имеет короткое замыкание на массу, разомкнута или имеет пониженное напряжение |
| 92 | B190112 | Короткое замыкание питания левого переднего датчика |
| 93 | B19014A | Модель левого переднего датчика не права |
| 94 | B190221 | Слишком короткое время афтершока переднего левого датчика |
| 95 | B190200 | Неправильное состояние сигнала датчика в левой передней части |
| 96 | B190214 | Левая передняя центральная сенсорная пара, короткое замыкание на массу, разомкнутая цепь или пониженное напряжение |
| 97 | B190212 | Короткое замыкание питания от левого переднего среднего датчика |
| 98 | B19024A | Левая передняя средняя модель датчика не права |
| 99 | B190321 | Слишком короткое время афтершока переднего правого датчика |
| 100 | B190300 | Неправильное состояние сигнала датчика в правой передней части |
| 101 | B190314 | Правая передняя центральная сенсорная пара, короткое замыкание на массу, разомкнутая цепь или пониженное напряжение |
| 102 | B190312 | Короткое замыкание питания от правого переднего и среднего датчиков |
| 103 | B19034A | Правая передняя средняя модель датчика не права |
| 104 | B190421 | Слишком короткое время афтершока правого переднего датчика |
| 105 | B190400 | Неправильное состояние сигнала переднего правого датчика |
| 106 | B190414 | Правая передняя сенсорная станция имеет короткое замыкание на массу или разомкнута или имеет пониженное напряжение |
| 107 | B190412 | Короткое замыкание питания правого переднего датчика |
| 108 | B19044A | Правая передняя модель датчика не права |
| 109 | B190721 | Слишком короткое время афтершока левого заднего датчика |
| 110 | B190700 | Неправильное состояние сигнала левого заднего датчика |
| 111 | B190714 | короткое замыкание на массу или разомкнутый контур или пониженное напряжение левого заднего датчика |
| 112 | B190712 | Короткое замыкание питания левой задней сенсорной пары |
| 113 | B19074A | Модель левого заднего датчика не права |
| 114 | B190821 | Слишком короткое время афтершока левого заднего среднего датчика |
| 115 | B190800 | Неправильное состояние сигнала датчика в левой задней части |
| 116 | B190814 | короткое замыкание на массу или разомкнутый контур или пониженное напряжение между левым и задним средними датчиками |
| 117 | B190812 | Короткое замыкание питания от левого заднего среднего датчика |
| 118 | B19084A | Левая задняя средняя модель датчика не права |
| 119 | B190921 | Слишком короткое время афтершока правого заднего среднего датчика |
| 120 | B190900 | Неправильное состояние сигнала датчика в правой задней части |
| 121 | B190914 | короткое замыкание на массу или разомкнутый контур или пониженное напряжение между правым и задним средними датчиками |
| 122 | B190912 | Короткое замыкание питания между правым и задним средними датчиками |
| 123 | B19094A | Правая задняя средняя модель датчика не права |
| 124 | B190A21 | Слишком короткое время афтершока правого заднего датчика |
| 125 | B190A00 | Неправильное состояние сигнала правого заднего датчика |
| 126 | B190A14 | короткое замыкание на массу или разомкнутый контур или пониженное напряжение правого заднего датчика |
| 127 | B190A12 | Короткое замыкание питания от правого заднего датчика |
| 128 | B190A4A | Правая задняя модель датчика не права |
| 129 | B190C17 | Слишком высокое напряжение датчика |
| 130 | B190C16 | Слишком низкое напряжение датчика |
| 131 | B190C11 | короткое замыкание на массу от источника питания датчика |
| 132 | B190E04 | Внутренняя неисправность ЭБУ |
| 133 | B190E44 | Отказ EEROM |
| 134 | B190E55 | Недопустимая информация о конфигурации сети или отсутствует конфигурация |
| 135 | B190F55 | Непрочтенный CAL или CAL MCU не соответствует типу |
| 136 | B191055 | SOC не написан кистью или SOC не соответствует типу |
# 360 Обозначение площадки кругового обзора Системы панорамного кругового обзора
Обозначение площадки
Примечание
- Условия маркировки: При замене контроллера, замене камеры или изменении положения установки камеры во время использования транспортного средства необходимо выполнить повторную маркировку. Модификация шасси автомобиля повлияла на высоту кузова, и изменения коснутся эффекта стыковки панорамных изображений, которые требуют повторной калибровки. Во время эксплуатации транспортное средство подлежит повторной маркировке в случае изменения положения камеры из-за загрузки груза, неровностей транспортного средства или старения компонентов. Перед калибровкой необходимо подтвердить чистоту 4 объективов камеры, отсутствие посторонних предметов, отсутствие защитной пленки.
- Номинальное расположение площадки: Общий размер площадки: не менее 6,3 м × 12,3 м. Цвет фона сайта: одиночный белый или белый чистый и не светится, не может быть черным или темно-серым. Плоскостность площадки: плоская поверхность, пузырьки находятся в положительном центре при измерении с помощью уровнемера в любом месте. Чистота площадки: поддержание чистоты, отсутствие водяных пятен, масляных загрязнений, отпечатков шин, мусора и т.д. Размер обозначенного блока: 1,2 м × 1,2 м квадратный блок (допуск ± 5 мм). Цвет блока опознавания: черный, не светоотражающий. Позиционирование блоков идентификации: Четыре позиционированных блока являются квадратными и находятся в одной горизонтальной плоскости. Позиционирование идентификационных блоков для реализации необязательного способа: нанесение черных блоков на ровный грунт. Используйте черную нетканую ткань толщиной ≤10mm, выровненную к земле перед калибровкой. Используйте плоскую интеграцию в пластину и т. Д. Поверхность нарисована черным цветом или наклеена черной нетканкой общей толщиной ≤10mm. Зона размером 50 см вокруг блока опознавания калибровки является ключевой областью и должна удовлетворять следующим требованиям: критическая область должна оставаться чистой и аккуратной, не иметь пятен (следы шин, следы и т.д.) и не должна отражаться. Цвет критической области - одиночный белый или белый чистый цвет. Если требования не выполнены, можно уложить белую бумагу по периметру калиброванного блока (лист плоский и не может иметь зазор между собой) или заменить его черной разметкой, наложенной поверх белой ткани размером 2,0 м * 2,2 м. Стандартное освещение площадки должно соответствовать следующим условиям: тип источника света: белый свет, диапазон цветовых температур 5000 К ~ 6500 К. Освещенность: Соответствие национальным стандартам CNS, измерение освещенности земли 200Lux ~ 700Lux (можно использовать более яркий естественный свет или лампы накаливания). Калибровка ключевой области имеет равномерную яркость и не имеет значительных оттенков. Освещение площадки не выстреливает прямо в камеру.
- Проверьте состояние транспортного средства: Давление в шинах нормальное. Задняя дверь закрыта на месте, отсутствие деформации, повреждения и другие аномалии вызывают большие отклонения угла установки камеры. Камера крепится, объектив чистый, без водяных пятен, пятен, пыли или защитной пленки камеры и других затенений. Зеркала заднего вида естественным образом разворачиваются, крепятся, без таких аномалий, как складывание, деформация или повреждение, двери закрываются на месте.
- Меры предосторожности при калибровке: При калибровке транспортное средство должно подъезжать по прямой от задней стороны площадки, а после калибровки - по прямой линии от передней стороны площадки и не может поворачивать на низкой скорости на площадке или блоке идентификации, чтобы избежать повреждения площадки. Во время калибровки не перемещайте транспортное средство и убедитесь, что посторонний персонал не входит в маркировку помех на указанной площадке. Во время автоматической калибровки убедитесь, что нет внешних источников света, мешающих калибровке, таких как другие источники света, работающие непосредственно на камеру, или что яркость критических областей не одинакова.
- Подготовка к калибровке
- Переключение питания в режим ON
- Подключение транспортных средств к диагностическим приборам
- Операционный диагностик “ автоматическая калибровка ” кнопка, инициирующая автоматическую калибровку
- Контроллер изображения панорамного кольца переходит в режим автоматической калибровки. Информации о экране изображения панорам выглядит следующим образом: (Примечание: При автоматической калибровки не перемещайте транспортное средство. Проверьте результаты калибровки (если это изображение превышает 10 секунд, устраните помехи на площадке и перезапустите транспортное средство для повторной калибровки). Сбой при калибровке. Не выключайте при сохранении стандартных данных. Маркировки выполнена успешно.)
- При автоматической калибровке не перемещайте транспортное средство.
- Проверьте результаты калибровки (если это изображение превышает 10 секунд, устраните помехи на площадке и перезапустите транспортное средство для повторной калибровки).
- Сбой при калибровке.
- Не выключайте при сохранении стандартных данных.
- Маркировка прошла успешно.
- Если калибровка выполнена успешно, проверьте эффект калибровки, например, неудовлетворительный эффект калибровки, и выполните многократную калибровку до тех пор, пока эффект калибровки не станет идеальным
- Если маркировка не удалась, осмотр площадки, подтверждения соответствия транспортного средств требований, повторная “ автоматическая разметка ”, если после трех повторений автоматическая разметка еще не выполнена, может быть выполнена “ ручная разметка ”
- Операционный диагностик “ ручная калибровка ” кнопка, инициирующая ручную калибровку
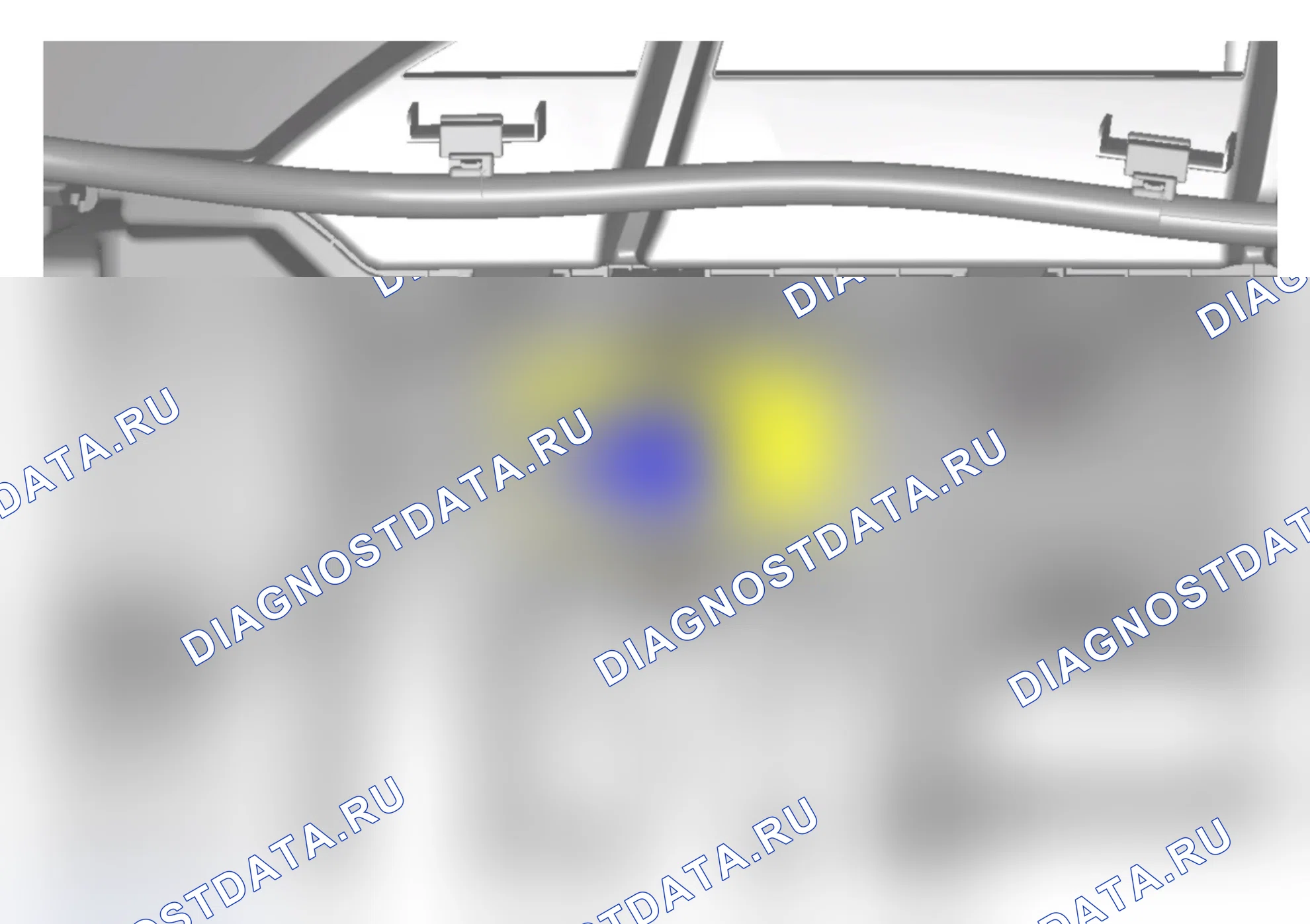
- Выбор вида , выбор углового точки и перемещение углового точки с помощью диагностического устройства. Функции совмещает четыре угловые точки изображения вида спереди, сзади, слева и справа с заданными углами блока. (Примечание: Функции переключения изображения панорам на соответствующую камеру “ ” выбор вида с помощью диагностики. Выберите “ угловые точки диагностики ” выберите точки, которые необходимо переместить, и выберите синий цвет. Перемещения через “ угловые точки диагностического устройства ” чтобы выбрать угловые точки, совпадающие с соответствующими угловыми точками блока калибровки. Перемещения угловых точек может осуществляться путем одновременного перемещения четырех точек или перемещения одной точки.)
- Функция переключения изображения панорамы на соответствующую камеру “ ” выбор вида с помощью диагностики.
- Выберите “ угловые точки диагностика ” выберите точки, которые необходимо переместить, и выберите синий цвет. Перемещение через “ угловые точки диагностического устройства ” чтобы выбрать угловые точки, совпадающие с соответствующими угловыми точками блока калибровки. Перемещение угловых точек может осуществляться путем одновременного перемещения четырех точек или перемещения одной точки.
- Срабатывает диагностик для калибровки, если после калибровки пунктирный эффект кругового обзора не является идеальным, Повторная калибровка может быть инициирована без повторного выбора точки угла, В этом случае системы просмотра панорамного кольца автоматически определяет точку в соответствии с областью, выбранной вручную. Если маркировка прошла успешно, эффект калибровки улучшится
- Если эффект калибровки остается неудовлетворительным, его можно выполнить повторно “ вручную ” до тех пор, пока эффект калибровки не станет идеальным
# Калибровка по дорожной разметки Системы панорамного кругового обзора
Внимание
- Замена HUT транспортного средства (встроенный AVM) После этого после того, как разметка дороги мягкий переключатель находится в состоянии золы , невозможно использовать функцию разметка дороги , необходимо сначала выполнить разметку площадки AVM , а после разметки дороги для нормального использования. Для обеспечения эффекта калибровки панорамного изображения при условии соблюдения “ разметки площадки ” предпочтение отдается использованию “ разметки площадки ”.
- Условия маркировки: При замене контроллера, замене камеры или изменении положения установки камеры во время использования транспортного средства необходимо выполнить повторную маркировку. Модификация шасси автомобиля повлияла на высоту кузова, и изменения коснутся эффекта стыковки панорамных изображений, которые требуют повторной калибровки. Во время эксплуатации транспортное средство подлежит повторной маркировке в случае изменения положения камеры из-за загрузки груза, неровностей транспортного средства или старения компонентов. Перед калибровкой необходимо подтвердить чистоту 4 объективов камеры, отсутствие посторонних предметов, отсутствие защитной пленки.
- На мультимедийном мониторе “ настройки транспортного средств ” или “ система управления автомобилем ” нажмите кнопку интерфейса “ помощник по парковке ”
- Нажмите кнопку “ Дорожная разметка ”, введите “ внимание ” интерфейс
- После выполнения “ мер предосторожности ” всех условий нажмите кнопку “ Перейти к разметке ”, чтобы выполнить разметку панорамного изображения (Осторожно: Процедура разметки дороги для панорамного изображения обзора строго соответствует правилам дорожного движения).
- Панорамный кругозор Посмотреть изображение Процесс разметки дорог Пожалуйста, строго соблюдайте правила дорожного движения.
- Следуйте подсказкам интерфейса мультимедийного монитора, пока не появится подсказка состояния калибровки (Примечание: После успешной калибровки появляется подсказка “ калибровка выполнена успешно ”. После ошибки при калибровке появляется сообщение “ Ошибка при калибровке ”. Подтверждение результатов калибровки по запросу.)
- После успешного выполнения калибровки появляется подсказка “ Успешное выполнение калибровки ”.
- После ошибки при калибровке появляется сообщение “ Ошибка при калибровке ”.
- Подтверждение результатов калибровки по запросу.
# Передняя камера кругового обзора
# Как снять и установить передняя камера кругового обзора
снятие
- Отсоединить минусовую клемму аккумулятора
- Снимите 10 защелок и снимите узел передней крышки моторного отсека
- Отсоедините разъём электрожгута и снимите 3 винта

- Снять фронтальную камеру наблюдения
установка
- Установка выполняется в обратном порядке (Примечание: после демонтажа и установки фронтальной камеры кругового обзора требуется перенастройка системы панорамного обзора).
- После демонтажа и установки фронтальной камеры кругового обзора необходимо выполнить повторную калибровку системы панорамного изображения.
# Левая/правая камера кругового обзора
# Как снять и установить левая/правая камера кругового обзора
снятие
- Отсоединить минусовую клемму аккумулятора
- Снятие узла наружных зеркал заднего вида (Примечание: левый/правый узел камеры кругового обзора интегрирован в левый/правый узел наружных зеркал заднего вида).
- Левая/правая кольцевая камера интегрирована в левую/правую внешнюю камеру заднего вида.
установка
- Установка выполняется в обратном порядке (Примечание: После демонтажа левого/правого узла наружного зеркала (встроенной камеры кругового обзора) и установки требуется перенастройка системы панорамного обзора).
- После демонтажа и установки левой/правой наружной камеры заднего вида (встроенной камеры кругового обзора) необходимо выполнить повторную калибровку системы панорамного обзора.
# Задняя камера кругового обзора
# Как снять и установить задняя камера кругового обзора
снятие
- Открой спину двери
- Отсоединить минусовую клемму аккумулятора
- Снятие спинки двери обивки
- Снятие наружной облицовки задних дверей
- Отсоединить разъём жгута
- Снять камеру заднего кругового обзора
установка
- Установка выполняется в обратном порядке (Примечание: после демонтажа и установки камеры кругового обзора требуется перенастройка системы панорамного обзора).
- После демонтажа и установки камеры кругового обзора необходимо выполнить повторную калибровку системы панорамного изображения.
# Датчик радара защиты от столкновений - левый/правый передний бампер
# Как снять и установить противоударный радиолокационный датчик
снятие
- Отсоединить минусовую клемму аккумулятора
- Поднять автомобиль в нужное положение
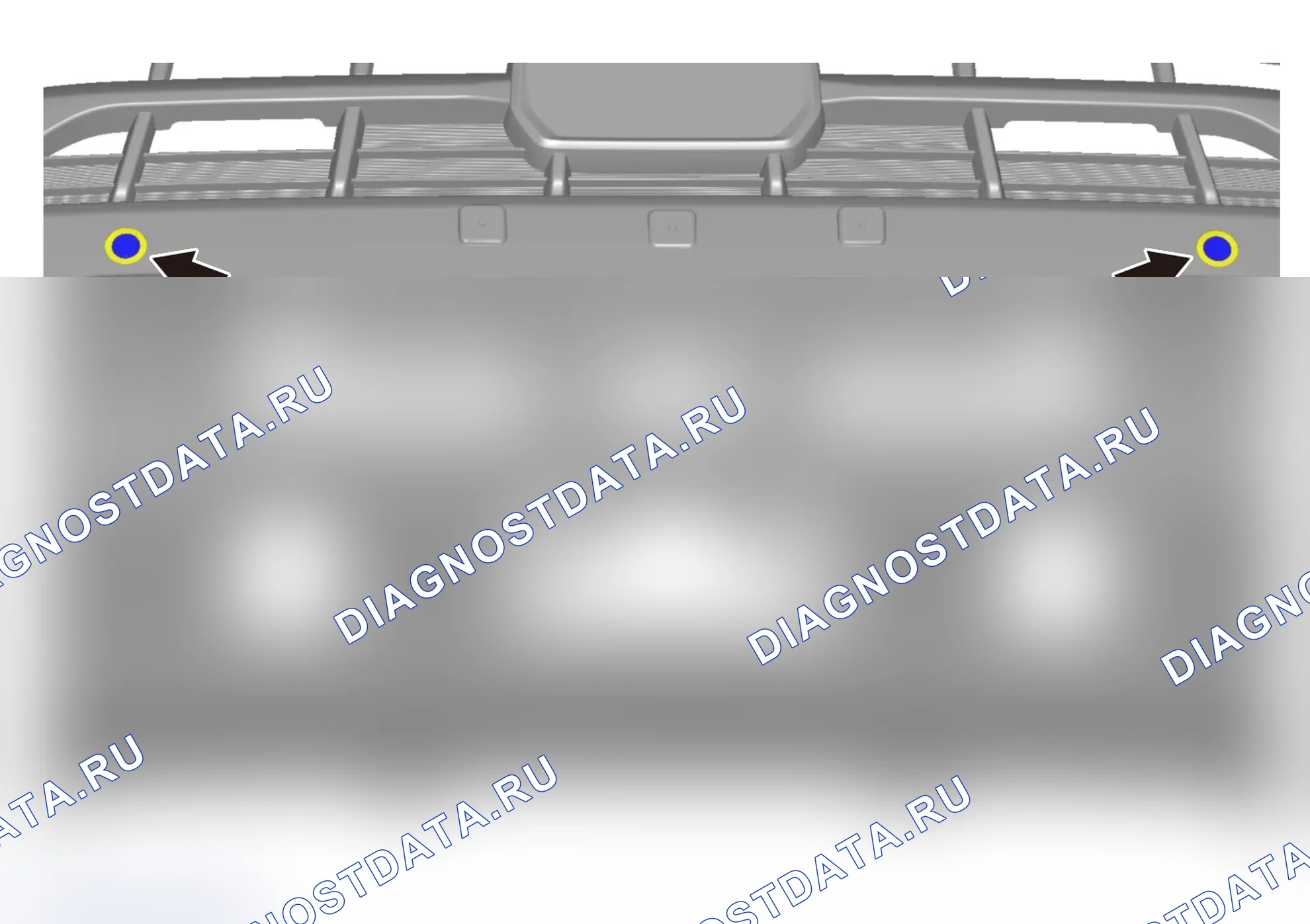
- Снимите 4 винта, соединенные передним бампером с передней брызгозащитной подушкой
- Подъем части водонепроницаемой подушки
- Раскройте кронштейн датчика РЛС и выведите датчик РЛС противоударной защиты наружу из бампера внутрь (Внимание: Запрещается надавливать силой на поверхность датчика РЛС).

- Запрещается нажимать силой на поверхность радиолокационного датчика.
- Отсоедините разъём электрожгута, снимите датчик радара системы предотвращения столкновений
установка
- Установка осуществляется в обратном порядке демонтажа
# Датчик радара защиты от столкновений - левый/правый передний средний бампер
# Как снять и установить противоударный радиолокационный датчик
снятие
- Отсоединить минусовую клемму аккумулятора
- Поднять автомобиль в нужное положение
- Выдвигается от проема под передний бампер
- Раскройте кронштейн датчика РЛС и выведите датчик РЛС противоударной защиты наружу из бампера внутрь (Внимание: Запрещается надавливать силой на поверхность датчика РЛС).
- Запрещается нажимать силой на поверхность радиолокационного датчика.
- Отсоедините разъём электрожгута, снимите датчик радара системы предотвращения столкновений
установка
- Установка осуществляется в обратном порядке демонтажа
# Датчик радар системы предотвращения столкновений - задний бампер
# Как снять и установить противоударный радиолокационный датчик
снятие
- Отсоединить минусовую клемму аккумулятора
- Поднять автомобиль в нужное положение
- Раскройте кронштейн датчика РЛС и выведите датчик РЛС противоударной защиты наружу из бампера внутрь (Внимание: Запрещается надавливать силой на поверхность датчика РЛС).
- Запрещается нажимать силой на поверхность радиолокационного датчика.
- Отсоедините разъём электрожгута, снимите датчик радара системы предотвращения столкновений
установка
- Установка осуществляется в обратном порядке демонтажа
# Контроллер панорамной системы (AVM)
# Как снять и установить контроллер панорамной системы
снятие
- Отсоединить минусовую клемму аккумулятора
- Перемещение основного водительского кресла на самый передний конец
- Резка ковров для ремонта мнимых вырезов, подъёма части ковра
- Снимите 3 гайки и отсоедините вставку жгута проводов

- Удаление контроллера панорамного слияния
установка
- Установка выполняется в обратном порядке (Примечание: после замены контроллера панорамного сопряжения необходимо в режиме онлайн просканировать конфигурационные слова, снабдить файлы и сделать панорамное изображение.)
- После замены контроллера панорамного сопряжения необходимо в режиме онлайн просканировать конфигурационные слова, снабдить файлы и сделать панорамное изображение.